БОЦЊЮФеТЪЧЖдAndroid MatrixРэТлгыЪЙгУНјааСЫЯъЯИЕФЗжЮіНщЩмЃЌашвЊЕФХѓгбВЮПМЯТ вдЧАдкЯпадДњЪ§жабЇЯАСЫОиеѓЃЌЖдОиеѓЕФЛљБОдЫЫугавЛаЉСЫНтЃЌЧАЖЮЪБМфдкЪЙгУGDI+ЕФЪБКђдйДЮбЇЯАШчКЮЪЙгУОиеѓРДБфЛЏЭМЯёЃЌПДСЫжЎКѓдкетРязмНсЫЕУїЁЃ
ЪзЯШИјДѓМвОйИіМђЕЅЕФР§згЃКЯжЩшЕуP0ЃЈx0ЃЌ y0ЃЉНјааЦНвЦКѓЃЌвЦЕНPЃЈxЃЌyЃЉЃЌЦфжаxЗНЯђЕФЦНвЦСПЮЊЁїxЃЌyЗНЯђЕФЦНвЦСПЮЊЁїyЃЌФЧУДЃЌЕуPЃЈxЃЌyЃЉЕФзјБъЮЊЃК ЩЯЪівВРрЫЦгыЭМЯёЕФЦНвЦЃЌЭЈЙ§ЩЯЪіОиеѓЮвУЧЗЂЯжЃЌжЛашвЊаоИФОиеѓгвЩЯНЧЕФ2ИідЊЫиОЭПЩвдСЫЁЃ ЮЊСЫбщжЄЩЯУцЕФЙІФмЛЎЗжЃЌЮвУЧОйИіОпЬхЕФР§згЃКЯжЩшЕуP0ЃЈx0 ЃЌy0ЃЉНјааЦНвЦКѓЃЌвЦЕНPЃЈxЃЌyЃЉЃЌЦфжаxЗХДѓaБЖЃЌyЗХДѓbБЖЃЌ ОиеѓОЭЪЧЃК ЭМЯёЕФа§зЊЩдЮЂИДдгЃКЯжЩшЕуP0ЃЈx0ЃЌ y0ЃЉа§зЊІШНЧКѓЕФЖдгІЕуЮЊPЃЈxЃЌ yЃЉЁЃЭЈЙ§ЪЙгУЯђСПЃЌЮвУЧЕУЕНШчЯТЃК гкЪЧЮвУЧЕУЕНОиеѓЃК ШчЙћЭМЯёЮЇШЦзХФГИіЕу(a ЃЌb)а§зЊФиЃПдђЯШвЊНЋзјБъЦНвЦЕНИУЕуЃЌдйНјааа§зЊЃЌШЛКѓНЋа§зЊКѓЕФЭМЯёЦНвЦЛиЕНдРДЕФзјБъдЕуЃЌдкКѓУцЕФЦЊЗљжаЮвУЧНЋЯъЯИНщЩмЁЃ MatrixбЇЯАЁЊЁЊШчКЮЪЙгУMatrixБОЦЊЗљЮвУЧОЭНсКЯAndroid жаЕФandroid.graphics.MatrixРДОпЬхЫЕУїЃЌЛЙМЧЕУЮвУЧЧАУцЫЕЕФЭМЯёа§зЊЕФОиеѓЃК
ДгзюМђЕЅЕФа§зЊ90ЖШЕФЪЧЃК
дкandroid.graphics.MatrixжагаЖдгІа§зЊЕФКЏЪ§ЃК
ВщПДдЫааКѓЕФОиеѓЕФжЕЃЈЭЈЙ§LogЪфГіЃЉЃК
гыЩЯУцЕФЙЋЪНЛљБОЭъШЋвЛбљЃЈandroid.graphics.MatrixВЩгУЕФЪЧИЁЕуЪ§ЃЌЖјЮвУЧВЩгУЕФећЪ§ЃЉЁЃ
ЧАУцИјДѓМвНщЩмСЫетУДЖрЃЌЯТУцЮвУЧПЊЪМНщЩмЭМЯёЕФОЕЯёЃЌЗжЮЊ2жжЃКЫЎЦНОЕЯёЁЂДЙжБОЕЯёЁЃЯШНщЩмШчКЮЪЕЯжДЙжБОЕЯёЃЌЪВУДЪЧДЙжБОЕЯёОЭВЛЯъЯИЫЕУїЁЃЭМЯёЕФДЙжБОЕЯёБфЛЏвВПЩвдгУОиеѓБфЛЏЕФБэЪОЃЌЩшЕуP0ЃЈx0 ЃЌy0 ЃЉНјааОЕЯёКѓЕФЖдгІЕуЮЊPЃЈx ЃЌy ЃЉЃЌЭМЯёЕФИпЖШЮЊfHeightЃЌПэЖШЮЊfWidthЃЌдЭМЯёжаЕФP0ЃЈx0 ЃЌy0 ЃЉОЙ§ДЙжБОЕЯёКѓЕФзјБъБфЮЊЃЈx0 ЃЌfHeight- y0ЃЉЃЛ
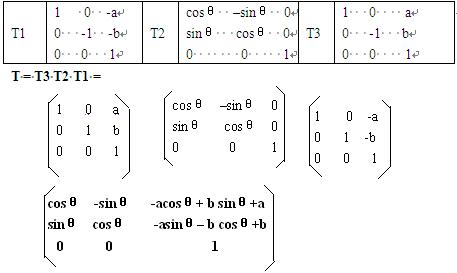
final float f[] = {1.0F,0.0F,0.0F,0.0F,-1.0F,120.0F,0.0F,0.0F,1.0F}; АДееЩЯЪіЗНЗЈдЫааКѓЕФНсЙћЃК жСгкЫЎЦНОЕЯёВЩгУРрЫЦЕФЗНЗЈЃЌДѓМвПЩвдздМКШЅЪдЪдАЩЁЃ MatrixбЇЯАЁЊЁЊЛљДЁжЊЪЖЦЊЗљжаЃЌЮвУЧСєЯТвЛИіЛАЬтЃКШчЙћЭМЯёЮЇШЦзХФГИіЕуP(aЃЌb)а§зЊЃЌдђЯШвЊНЋзјБъЯЕЦНвЦЕНИУЕуЃЌдйНјааа§зЊЃЌШЛКѓНЋа§зЊКѓЕФЭМЯёЦНвЦЛиЕНдРДЕФзјБъдЕуЁЃ ЮвУЧашвЊ3ВНЃК
АДееЩЯУцЕФЙЋЪНЃЌЮвУЧСаОйвЛИіМђЕЅЕФР§згЃКЮЇШЦЃЈ100ЃЌ100ЃЉа§зЊ30ЖШ(sin 30 = 0.5 ЃЌcos 30 = 0.866)
AndroidЮЊЮвУЧЬсЙЉСЫИќМгМђЕЅЕФЗНЗЈЃЌШчЯТЃК
ДгзюЛљБОЕФИпЕШЪ§бЇПЊЪМЃЌMatrixЕФЛљБОВйзїАќРЈЃК+ЁЂ*ЁЃMatrixЕФГЫЗЈВЛТњзуНЛЛЛТЩЃЌвВОЭЪЧЫЕA*B ЁйB*AЁЃЛЙга2жжГЃМћЕФОиеѓЃК
гаСЫЩЯУцЕФЛљДЁЃЌЯТУцЮвУЧПЊЪМНјШыжїЬтЁЃгЩгкОиеѓВЛТњзуНЛЛЛТЩЃЌЫљвдгУОиеѓBГЫвдОиеѓAЃЌашвЊПМТЧЪЧзѓГЫЃЈB*AЃЉЃЌЛЙЪЧгвГЫЃЈA*BЃЉЁЃдкAndroidЕФandroid.graphics.MatrixжаЮЊЮвУЧЬсЙЉСЫРрЫЦЕФЗНЗЈЃЌвВОЭЪЧЮвУЧБОЦЊЗљвЊЫЕУїЕФPreconcats matrix гы Postconcats matrixЁЃЯТУцЮвУЧЛЙЪЧЭЈЙ§ОпЬхЕФР§згЛЙЫЕУїЃК
ЭЈЙ§ЪфГіЕФаХЯЂЃЌЮвУЧЗжЮіЦфдЫааЙ§ГЬШчЯТЃК
ПДСЫЩЯУцЕФЪфГіаХЯЂЁЃЮвУЧЕУГіНсТлЃКPreconcats matrixЯрЕБгкгвГЫОиеѓЃЌPostconcats matrixЯрЕБгкзѓГЫОиеѓЁЃ
ЪВУДЪЧЭМЯёЕФДэЧаБфЛЛЃЈShear transformationЃЉЃПЮвУЧЛЙЪЧжБНгПДЭМЦЌДэЧаБфЛЛКѓЪЧЕФаЇЙћЃК
ЖдЭМЯёЕФДэЧаБфЛЛзіИізмНсЃК
x = x0 + b*y0;
етРядйДЮИјДѓМвНщЩмвЛИіашвЊзЂвтЕФЕиЗНЃК
ЭЈЙ§вдЩЯЃЌЮвУЧЗЂЯжMatrixЕФsetXXXX()КЏЪ§ЃЌдкЕїгУЪБЕїгУСЫвЛДЮreset()ЃЌетИідкИДКЯБфЛЛЪБашвЊзЂвтЁЃ MatrixбЇЯАЁЊЁЊЖдГЦБфЛЛЃЈЗДЩфЃЉЪВУДЪЧЖдГЦБфЛЛЃПОпЬхЕФРэТлОЭВЛЯъЯИЫЕУїСЫЃЌЭМЯёЕФОЕЯёОЭЪЧЖдГЦБфЛЛжаЕФвЛжжЁЃ
РћгУЩЯУцЕФзмНсзіИіОпЬхЕФР§згЃЌВњЩњгыжБЯпy= ЈC xЖдГЦЕФЗДЩфЭМаЮЃЌДњТыЦЌЖЮШчЯТЃК
ЕБЧАОиеѓЪфГіЪЧЃК
ЭМЯёБфЛЛЕФаЇЙћШчЯТЃК
СННЧКЭЙЋЪН sin(a+b)=sinacosb+cosasinb sin(a-b)=sinacosb-sinbcosa ? cos(a+b)=cosacosb-sinasinb cos(a-b)=cosacosb+sinasinb tan(a+b)=(tana+tanb)/(1-tanatanb) tan(a-b)=(tana-tanb)/(1+tanatanb) cot(a+b)=(cotacotb-1)/(cotb+cota) ? cot(a-b)=(cotacotb+1)/(cotb-cota) БЖНЧЙЋЪН tan2a=2tana/[1-(tana)^2] cos2a=(cosa)^2-(sina)^2=2(cosa)^2 -1=1-2(sina)^2 sin2a=2sina*cosa АыНЧЙЋЪН sin(a/2)=ЁЬ((1-cosa)/2) sin(a/2)=-ЁЬ((1-cosa)/2) cos(a/2)=ЁЬ((1+cosa)/2) cos(a/2)=-ЁЬ((1+cosa)/2) tan(a/2)=ЁЬ((1-cosa)/((1+cosa)) tan(a/2)=-ЁЬ((1-cosa)/((1+cosa)) cot(a/2)=ЁЬ((1+cosa)/((1-cosa)) cot(a/2)=-ЁЬ((1+cosa)/((1-cosa)) ? tan(a/2)=(1-cosa)/sina=sina/(1+cosa) КЭВюЛЏЛ§ 2sinacosb=sin(a+b)+sin(a-b) 2cosasinb=sin(a+b)-sin(a-b) ) 2cosacosb=cos(a+b)-sin(a-b) -2sinasinb=cos(a+b)-cos(a-b) sina+sinb=2sin((a+b)/2)cos((a-b)/2 cosa+cosb=2cos((a+b)/2)sin((a-b)/2) tana+tanb=sin(a+b)/cosacosb Л§ЛЏКЭВюЙЋЪН sin(a)sin(b)=-1/2*[cos(a+b)-cos(a-b)] cos(a)cos(b)=1/2*[cos(a+b)+cos(a-b)] sin(a)cos(b)=1/2*[sin(a+b)+sin(a-b)] геЕМЙЋЪН sin(-a)=-sin(a) cos(-a)=cos(a) sin(pi/2-a)=cos(a) cos(pi/2-a)=sin(a) sin(pi/2+a)=cos(a) cos(pi/2+a)=-sin(a) sin(pi-a)=sin(a) cos(pi-a)=-cos(a) sin(pi+a)=-sin(a) cos(pi+a)=-cos(a) tga=tana=sina/cosa ЭђФмЙЋЪН sin(a)= (2tan(a/2))/(1+tan^2(a/2)) cos(a)= (1-tan^2(a/2))/(1+tan^2(a/2)) tan(a)= (2tan(a/2))/(1-tan^2(a/2)) ЦфЫќЙЋЪН a*sin(a)+b*cos(a)=sqrt(a^2+b^2)sin(a+c) [ЦфжаЃЌtan(c)=b/a] a*sin(a)-b*cos(a)=sqrt(a^2+b^2)cos(a-c) [ЦфжаЃЌtan(c)=a/b] 1+sin(a)=(sin(a/2)+cos(a/2))^2 1-sin(a)=(sin(a/2)-cos(a/2))^2 ЦфЫћЗЧжиЕуШ§НЧКЏЪ§ csc(a)=1/sin(a) sec(a)=1/cos(a) ЫЋЧњКЏЪ§ sinh(a)=(e^a-e^(-a))/2 cosh(a)=(e^a+e^(-a))/2 tgh(a)=sinh(a)/cosh(a) |



 ЃЌАДееРрЫЦЧАУцЁАЦНвЦЁБЕФЗНЗЈОЭбщжЄЁЃ
ЃЌАДееРрЫЦЧАУцЁАЦНвЦЁБЕФЗНЗЈОЭбщжЄЁЃ
![clip_image005[1]](data/attachment/portal/202004/11/202004112013052017013548.jpg "clip_image005[1]")



























